
Researchers and maritime organizations are developing real-time monitoring systems to mitigate noise frequencies
|
Getting your Trinity Audio player ready...
|
Click to view glossary
Responding to noise in real-time
When operators can monitor underwater noise created by their vessel and detect changes in noise emissions, they can identify when noise exceeds a certain threshold and make operational changes to reduce it. Outfitting vessels with sensors to monitor noise sources, such as propellers, engines, generators, and hull vibrations, enables operators to monitor vessel performance in real time.
With real-time noise feedback, operators can make adjustments—like reducing speed when safe—to reduce noise levels as conditions change. Additionally, real-time monitoring could support the development of alert systems that notify operators when noise exceeds certain thresholds.
As highlighted in the first article in this series, Technology for Detecting and Analysing Underwater Radiated Noise, several Quiet Vessel Initiative projects looked at developing systems to monitor propeller cavitation—a major source of high-frequency noise—in real time to guide operational decisions at sea. The joint Det Norske Veritas (DNV) and ABB Canada project CLUE – Continuous Logging of Underwater Noise Emissions focused on developing systems to detect cavitation noise generated by AzipodTM propulsion systems, which house an electric drive motor outside a cruise ship in a pod capable of turning 360 degrees. DNV is a global independent assurance and risk management provider and ABB is a global technology leader in electrification and automation.
Schottel’s Hydrodynamic Propeller Noise Monitoring System (HyPNoS) project created a prototype monitoring system installed on a large passenger ferry that measured hull vibrations above the propeller. Measurements from this system were used to develop and train an AI-ready algorithm to estimate underwater radiated noise based on hull vibrations. Schottel develops and produces versatile propulsion and control systems for ships.
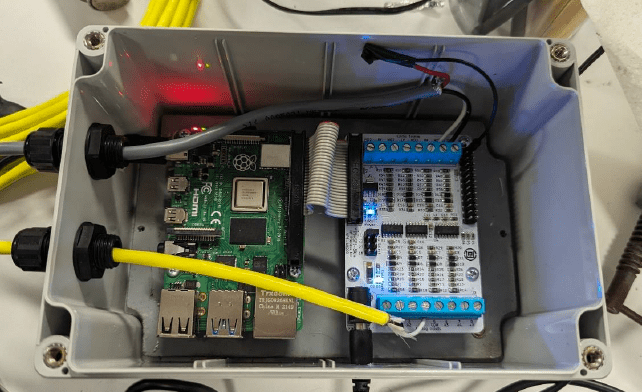
While these systems were intended for large commercial vessels, a Lloyd’s Register project, Mitigation of Radiated Noise of Small Marine Craft using Condition-Based Monitoring, looked at developing a more suitable solution for small fishing vessels using a Raspberry Pi, an accelerometer placed on the hull above the propeller, and a tachometer to measure the propeller’s revolutions per minute. By combining sensor measurements with vessel parameters such as the season, the year the vessel was built, and the engine’s horsepower, this more basic system could identify when a vessel was cavitating and estimate the level of underwater radiated noise emitted based on the vessel’s operating conditions. Lloyd’s Register is an international shipping classification and ship design provider.

In addition to these projects, the Validation of Underwater Radiated Noise Modelling via Specific Ship Measurement project from the classification society American Bureau of Shipping (ABS) is working towards developing a real-time monitoring system that uses models and data collected from sensors on board a vessel to update a noise-prediction model continuously. One possible application of this system is to generate recommendations for operational adjustments that help the vessel operator reduce underwater noise in ways that are appropriate for the species of marine life detected near the vessel. Working with the Canadian Coast Guard, ABS evaluated several methods—ranging from advanced computational fluid dynamics simulations to simplified empirical approaches—to determine which could provide reliable noise-prediction results. Computational fluid dynamics enables engineers and researchers to simulate how fluids flow around objects such as ships or specific components like hulls and propellers. By modelling how water moves around and interacts with a vessel, designers can identify where and under what conditions drag, turbulence, and increased noise may occur. The researchers ultimately concluded that highly complex, expensive, and time-consuming computational fluid dynamics models were unnecessary; a simplified computational fluid dynamics model is sufficient to produce reliable results.
Alongside the projects mentioned above, another Quiet Vessel Initiative project, the University of Victoria’s Computational Fluid Dynamics Tools for Prediction of Cavitation-Induced Underwater Radiated Noise, is using fluid dynamics to predict cavitation and the associated underwater noise produced. If operators can better understand when their vessel may be cavitating, there may be circumstances where they can alter operations to reduce noise in critical habitat or marine protected areas, for example.
Rather than developing a real-time monitoring system, the project, An Adaptive Physics-Based Machine Learning Framework for Anthropogenic Noise and Ocean Soundscape (MELO), is focusing on creating an adaptive noise-mitigation strategy. As a collaborative effort between Clear Seas and University of British Columbia researchers from the Marine Mammal Research Unit and the Computational Multiphysics Laboratory, the adaptive strategy will use a machine-learning model that can predict noise from different sources on a ship and then, based on what marine biologists know about marine mammals’ sensitivity to noise, create an adaptive noise-mitigation strategy that vessels can use while in operation. Among other things, the adaptive strategy may include targeting specific frequencies that are known to interfere with particular groups of marine mammals. For example, humpback whales are thought to be impacted more by low-frequency noise while killer whales are thought to be affected more by high-frequency noise. In the presence of humpbacks, vessel operators could prioritize reducing low-frequency noise such as that caused by hull vibrations, but in the presence of killer whales, reduction of high-frequency noise, such as that caused by propeller cavitation, may be a higher priority.
Not all plain sailing for real-time monitoring
As part of the JASCO Applied Sciences Ltd. Feasibility of Real-Time Shipboard Cavitation Monitoring and Management project, researchers developed an onboard cavitation monitoring system and tested it on Canada Steamship Lines’ MV Ferbec. This 188 metre bulk carrier transports goods along the St Lawrence River between Havre-Saint-Pierre, Quebec, and Sorel-Tracy, Quebec. The project highlights several challenges facing the implementation of real-time cavitation monitoring systems on certain vessels.

First, installing the sensors so they collect data accurately over longer periods of time can be challenging due to factors like environmental conditions and calibration and maintenance requirements. Second, although cavitation was measurable using pressure and acceleration sensors, the measurements were more suitable for answering the question of whether cavitation was happening than for fine-tuning operations to avoid cavitation. Third, navigational constraints meant that the system was not used by vessel operators to change operations and reduce noise.
The vessel’s captain highlighted that the cavitation monitoring system was not used to guide operations. Instead, navigation relied on adhering to the 10-knot speed limits in the Gulf of St. Lawrence and around the mouth of the Saguenay River while optimizing transit times between ports so the vessel could arrive during high tide and safely enter without having to anchor and wait.
This article was prepared by Clear Seas on behalf of Transport Canada as part of the Quiet Vessel Initiative and is part of a four-article series on operational changes to limit underwater vessel noise.
Continue learning about the new discoveries and challenges in making vessels quieter with the other topics in this series here
The Quiet Vessel Initiative is a federally funded program through Transport Canada. Industry partners and researchers interested in potential research and development collaborations to advance innovative solutions in marine technology are invited to contact the Quiet Vessel Initiative team at Marine-RDD-maritime@tc.gc.ca.
Cavitation: Propeller cavitation is created by rapid changes in water pressure around the propeller. When a propeller turns, it creates a low-pressure area on one side of the blade and a high-pressure area on the other. When the propeller turns quickly, or the vessel and propeller are under a heavy load, the rapid pressure drop causes the water to evaporate and form vapour bubbles that move over the blades. As the bubbles reach the high-pressure area, they collapse, making noise.
Measurement efforts have shown that propeller cavitation is more common at higher speeds due to greater loads on propeller blades or when propeller blades are misaligned or damaged. Other vessel factors, such as the hull design, also influence cavitation. Propeller cavitation isn’t just a noise issue. It also erodes the propeller surfaces, reducing their performance and efficiency.
Computational fluid dynamics: Computational fluid dynamics is a method used to study how fluids, like water and air, move. It involves using computers to solve mathematical equations that describe fluid motion. With computational fluid dynamics, engineers and researchers can create virtual simulations to see how fluids flow around objects, such as ships, or specific components, like the hull or the propeller. Understanding how water moves around and interacts with vessels allows designers to see where drag or turbulence might occur and focus on optimizing vessel design. We can also use computational fluid dynamics to create simulations of different design concepts. This way, we can test and refine components without needing to physically build them, allowing for a more efficient design process.
Frequency: sound moves through a medium like water as a wave, thus the term sound wave. Frequency, also known as pitch, indicates how often a sound wave repeats within a single second. Measured in Hertz (Hz), or cycles per second, higher numbers signify higher-pitched sounds, and lower numbers signify lower-pitched sounds.
Marine life: Mammals, fish, and invertebrates living in the ocean environment.
Underwater noise: sound generated below water by human activity in the ocean environment. Various industries contribute to underwater noise—offshore energy, construction, military operations, and of course vessel traffic. The noise generated by vessels is referred to as underwater radiated noise.
Propeller, cavitation: When a propeller turns, it creates a low-pressure area on one side of the blade and a high-pressure area on the other. In many cases, the pressure in the low-pressure area is low enough to cause cavitation, a change in phase from liquid to vapour, like boiling, but caused by a change in pressure rather than a change in temperature. When areas of sufficiently low pressure are generated in water, vapour bubbles form. As the vapour bubbles leave the area of low pressure, those bubbles collapse (implode).
Because the pressure differences are usually large, the collapse of cavitation bubbles is very powerful and loud. Other vessel factors, such as the hull design, also influence cavitation. Measurement efforts have shown that propeller cavitation is more common at higher speeds due to greater loads on propeller blades. Cavitation can also occur when propeller blades are misaligned or damaged. In addition to creating a great deal of sound, cavitation bubbles can damage or degrade metallic surfaces like propellers, reducing their performance and efficiency.
Machine-learning model: the use and development of computer systems that are able to learn and adapt without following explicit instructions, by using algorithms and statistical models to analyse and draw inferences from patterns in data.
Accelerometer: a device that measures the vibration, or acceleration of motion, of a structure. The force caused by vibration or a change in motion (acceleration) causes the mass to “squeeze” the piezoelectric material, which produces an electrical charge that is proportional to the force exerted upon it. Since the charge is proportional to the force, and the mass is constant, then the charge is also proportional to the acceleration. These sensors are used on a variety of platforms – from space stations to handheld devices like smartphones.
Algorithm: a process or set of rules to be followed in calculations or other problem-solving operations, especially by a computer. Algorithms act as an exact list of instructions that conduct specified actions step by step in either hardware- or software-based routines.
Tachometer: an instrument measuring the rotation speed of a shaft or disk, as in a motor or other machine. The device usually displays the revolutions per minute (RPM).
Azimuth propulsion system or Azipod®: a configuration of marine propellers placed in pods that can be rotated to any horizontal angle (azimuth), making a rudder redundant. These give ships better maneuverability than a fixed propeller and rudder system. An Azipod® is essentially an azimuth thruster where the electric drive motor is contained inside the pod itself, beneath the water surface.


