
Des systèmes de suivi en temps réel sont développés pour réduire les fréquences sonores marines.
|
Getting your Trinity Audio player ready...
|
Cliquez pour consulter le glossaire
Réagir au bruit en temps réel
Munir les navires de capteurs qui surveillent les sources de bruit – p. ex., hélices, moteurs, génératrices et vibrations de la coque – permet de surveiller les performances du navire en temps réel et offre des possibilités de réduire le bruit qu’il émet.
Grâce à la rétroaction sur le bruit en temps réel, les exploitants peuvent adapter leur comportement, par exemple en ralentissant s’il est possible de le faire en toute sécurité, afin de réduire les niveaux de bruit en fonction de l’évolution des conditions. En outre, la surveillance en temps réel pourrait favoriser la mise au point de systèmes d’alerte qui préviendraient les exploitants quand le bruit dépasse certains seuils. Cette capacité pourrait être utile à l’avenir, si des zones avec des limites de bruit obligatoires sont établies ou si des réglementations stipulent des seuils de bruit dans les habitats marins critiques.
Comme nous l’avons souligné dans le premier article de cette série, Détection et mesure du bruit rayonné sous-marin, plusieurs projets de l’Initiative pour des navires silencieux ont porté sur la mise au point de systèmes permettant de surveiller la cavitation des hélices – une importante source de bruit à haute fréquence – en temps réel et d’orienter ainsi les décisions opérationnelles en mer. Le projet CLUE [« Continuous Logging of Underwater Noise Emissions » (enregistrement continu des émissions de bruit sous-marin)] mené conjointement par Det Norske Veritas (DNV) et ABB Canada, s’est concentré sur la mise au point de systèmes permettant de détecter le bruit de cavitation généré par les systèmes de propulsion Azipod®. Ces systèmes abritent un moteur d’entraînement électrique dans une nacelle placée à l’extérieur d’un navire de croisière et peuvent pivoter sur 360 degrés.
Le projet HyPNoS « Hydrodynamic Propeller Noise Monitoring System » (système de surveillance du bruit des hélices hydrodynamiques) de Schottel a permis de créer un prototype de système de surveillance installé sur un grand traversier de passagers, qui se concentre sur les vibrations de la coque au-dessus de l’hélice. Les mesures de ce système ont été utilisées pour élaborer et former un algorithme prêt pour l’IA afin d’estimer le bruit rayonné sous-marin sur la base des vibrations.
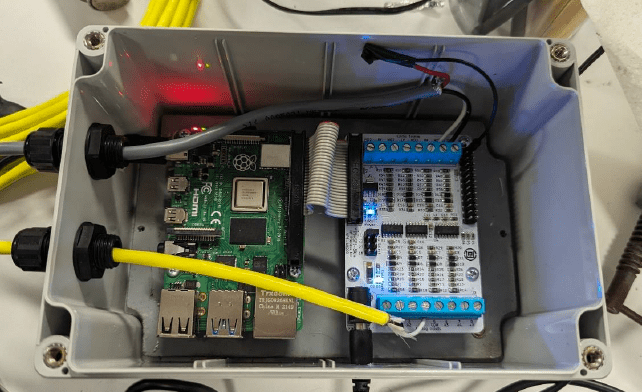
Alors que ces systèmes ont été conçus pour les grands navires commerciaux, un projet du Lloyd’s Register, intitulé « Mitigation of Radiated Noise of Small Marine Craft using Condition-Based Monitoring » (réduction du bruit rayonné par les petits bateaux grâce à une surveillance fondée sur l’état) , a cherché à élaborer une solution plus adaptée aux petits bateaux de pêche en utilisant un Rapsberry PI, un accéléromètre placé sur la coque au-dessus de l’hélice et un tachymètre pour mesurer le nombre de tours par minute de l’hélice. En combinant les mesures de ces capteurs avec la saison, l’année de construction du navire et la puissance du moteur, le système a pu déterminer avec succès la cavitation d’un navire et estimer le niveau de bruit sous-marin rayonné qu’il émet sur la base de ses conditions opérationnelles à ce moment-là.

Outre ces projets, le projet d’ABS, « Validation of Underwater Radiated Noise Modelling via Specific Ship Measurement » (validation de la modélisation du bruit rayonné sous-marin à l’aide de mesures précises effectuées sur des navires), vise à élaborer un système de surveillance en temps réel fondé sur des modèles et des données recueillies par des capteurs embarqués, qui moderniserait un modèle de prévision du bruit en temps réel. Potentiellement, le système pourrait recommander des changements opérationnels adaptés à des espèces particulières de la vie marine repérées à proximité ou pour se conformer aux réglementations en matière de limitation du bruit. Comme pour les autres solutions de surveillance en temps réel explorées dans le cadre des projets de l’Initiative pour des navires silencieux, la solution d’ABS est encore en cours de développement. En collaboration avec la Garde côtière canadienne, ABS a testé différents modèles afin d’évaluer la quantité de données et le niveau de complexité nécessaires. Les résultats suggèrent qu’un modèle de « moyenne fidélité » étayé par la dynamique des fluides numérique offre une bonne valeur en termes de temps de traitement et de besoins, de coût et de résultats qui peuvent fournir des recommandations précises de changements opérationnels. En fait, un modèle « haute fidélité », plus complexe et plus exigeant en termes de données et de traitement, n’a pas donné de meilleurs résultats que le modèle « moyenne fidélité ». Inversement, un modèle beaucoup plus simple fondé sur des formules empiriques, par opposition à la dynamique des fluides numérique, s’est avéré inadapté.
L’adoption généralisée de la surveillance du bruit en temps réel n’étant probablement pas pour demain en raison de l’état de préparation technologique ou de contraintes financières, les exploitants de navires pourraient bénéficier plus rapidement des progrès réalisés dans le cadre de ces projets et d’autres projets de l’Initiative pour des navires silencieux. Outre ceux susmentionnés, d’autres projets de l’Initiative pour des navires silencieux, comme « Computational Fluid Dynamics Tools for Prediction of Cavitation-Induced Underwater Radiated Noise » (outils de dynamique des fluides numérique pour la prédiction du bruit rayonné sous-marin induit par la cavitation) de l’Université de Victoria – qui vise à utiliser la dynamique des fluides pour prédire la cavitation et le bruit sous-marin qui en découle – pourraient aider à cerner les comportements opérationnels particulièrement problématiques. Si les exploitants ne sont pas en mesure d’éviter complètement ce type d’opérations, ils peuvent dans certains cas opter pour une solution plus silencieuse. Le fait d’avoir une bonne idée de la vitesse à laquelle la cavitation est susceptible de se déclencher peut aider les exploitants à choisir des vitesses de transit plus silencieuses dans les habitats critiques ou les zones marines protégées, pour commencer.
Plutôt que de mettre au point un système de surveillance en temps réel, le projet MELO : Solutions intelligentes et adaptatives pour lutter contre le bruit sous-marin se concentre sur l’élaboration d’une stratégie adaptative d’atténuation du bruit. Fruit d’une collaboration entre Clear Seas et des chercheurs de l’Unité de recherche sur les mammifères marins et du Laboratoire de multiphysique computationnelle de l’Université de la Colombie-Britannique, la stratégie adaptative utilisera un modèle d’apprentissage machine capable de prédire le bruit provenant de différentes sources sur un navire, puis, sur la base de ce que les biologistes marins savent de la sensibilité des mammifères marins au bruit, créera une stratégie adaptative d’atténuation du bruit que les navires pourront utiliser en cours de fonctionnement. La stratégie adaptative peut notamment viser des fréquences précises connues pour interférer avec des groupes particuliers de mammifères marins. Par exemple, on pense que les baleines à bosse sont plus touchées par les bruits de basse fréquence, tandis que les épaulards sont plus touchés par les sons de haute fréquence. En présence de baleines à bosse, les exploitants de navires devraient tenter avant tout de réduire les bruits de basse fréquence, mais en présence d’épaulards, la réduction des bruits de haute fréquence, tels que ceux causés par la cavitation des hélices, devrait être la priorité.
La surveillance en temps réel n’est pas toujours une sinécure
Dans le cadre du projet conjoint de JASCO Applied Sciences Ltd. et d’AllSalt Maritime intitulé « Onboard Cavitation Monitoring » (surveillance de la cavitation à bord), les chercheurs ont mis au point un système de surveillance de la cavitation à bord et l’ont testé sur le MV Ferbec de Canada Steamship Lines. Ce vraquier de 188 mètres transporte des marchandises sur le fleuve Saint-Laurent entre Havre-Saint-Pierre (Québec) et Sorel-Tracy (Québec). Le projet met en évidence plusieurs défis liés à la surveillance de la cavitation en temps réel.

Tout d’abord, installer des capteurs de manière à ce qu’ils recueillent des données avec précision peut s’avérer difficile et coûteux. Deuxièmement, bien que la cavitation ait pu être mesurée à l’aide de capteurs de pression et d’accélération, les mesures étaient plus appropriées pour répondre à la question de savoir si la cavitation se produisait que pour affiner les opérations afin qu’elle ne se produise pas. Troisièmement, les exploitants du navire n’ont pas utilisé le système pour éclairer les opérations.
Le capitaine du navire a souligné deux raisons principales pour lesquelles il n’utilisait pas le système pour guider ses opérations : les limites de vitesse de navigation et les itinéraires fixés par Transports Canada et la nécessité d’optimiser les temps de transit entre les ports afin que le navire puisse arriver à marée haute et entrer en toute sécurité dans le port sans avoir à jeter l’ancre et à attendre. Compte tenu de ces contraintes, le capitaine ne pense pas que la réduction du bruit rayonné sous-marin constituera une contrainte opérationnelle pour le transport maritime, à moins qu’elle ne soit imposée par la réglementation.
Cet article a été rédigé par Clear Seas pour le compte de Transports Canada dans le cadre de l’Initiative pour des navires silencieux. Il fait partie d’une série de quatre articles sur les changements opérationnels visant à limiter le bruit sous-marin des navires.
Pour en savoir plus sur les nouvelles découvertes et les défis à relever pour rendre les navires plus silencieux, consultez les autres sujets de cette série ici.
L’Initiative pour des navires silencieux est financée par le gouvernement fédéral par l’intermédiaire de Transports Canada. Les partenaires industriels et les chercheurs intéressés par d’éventuelles collaborations en matière de recherche et de développement afin de faire progresser les solutions novatrices dans le domaine de la technologie marine sont invités à contacter l’équipe de l’Initiative pour des navires silencieux à l’adresse suivante : Marine-RDD-maritime@tc.gc.ca
Dynamique des fluides numérique : La dynamique des fluides numérique est une méthode utilisée pour étudier le mouvement des fluides, comme l’eau et l’air. Elle consiste à utiliser des ordinateurs pour résoudre les équations mathématiques qui décrivent le mouvement des fluides. Grâce à la dynamique des fluides numérique, les ingénieurs et les chercheurs peuvent créer des simulations virtuelles pour voir comment les fluides s’écoulent autour d’objets, comme les navires, ou de composants particuliers, comme la coque ou l’hélice. Comprendre comment l’eau se déplace autour des navires et interagit avec eux permet aux concepteurs de voir où la traînée ou les turbulences peuvent se produire et de se concentrer sur l’optimisation de la conception du navire. La dynamique des fluides numérique peut créer des simulations de différents concepts afin de tester et d’affiner les composants sans avoir à les construire physiquement, ce qui permet un processus de conception plus efficace.
Modèle d’apprentissage machine : Utilisation et mise au point de systèmes informatiques capables d’apprendre et de s’adapter sans suivre d’instructions explicites, grâce à des algorithmes et des modèles statistiques permettant d’analyser et de tirer des conclusions à partir de tendances dans les données.
Accéléromètre : Appareil qui mesure la vibration ou l’accélération du mouvement d’une structure. La force causée par la vibration ou un changement de mouvement (accélération) fait que la masse « écrase » le matériau piézoélectrique qui produit une charge électrique proportionnelle à la force exercée sur lui. Étant donné que la charge est proportionnelle à la force et que la masse est constante, la charge est également proportionnelle à l’accélération. Ces capteurs sont utilisés sur une variété de plateformes, depuis les stations spatiales jusqu’aux appareils portables comme les téléphones intelligents.
Algorithme : Processus ou ensemble de règles à suivre dans les calculs ou autres opérations de résolution de problèmes, en particulier par un ordinateur. Les algorithmes agissent comme une liste exacte d’instructions qui exécutent des mesures précisées étape par étape dans le cadre de routines matérielles ou logicielles.
Tachymètre : instrument mesurant la vitesse de rotation d’un arbre ou d’un disque, comme dans un moteur ou une autre machine. L’appareil affiche généralement le nombre de tours par minute (RPM).
Système de propulsion azimutal ou Azipod® : configuration d’hélices marines placées dans des nacelles pouvant pivoter à n’importe quel angle horizontal (azimut), rendant ainsi le gouvernail superflu. Elles confèrent aux navires une meilleure maniabilité qu’un système à hélice et gouvernail fixes. Un Azipod® est essentiellement un propulseur azimutal dont le moteur électrique est logé à l’intérieur de la nacelle elle-même, sous la surface de l’eau.
Conditions océanographiques : Caractéristiques physiques et chimiques de l’océan qui varient dans l’espace et le temps. Elles comprennent des facteurs comme la température, la salinité, les courants, les vagues, les marées, la concentration et l’épaisseur de la glace et les vents de surface.
Hélice, (cavitation de l’) : Lorsqu’une hélice tourne, elle crée une zone de basse pression d’un côté de la pale et une zone de haute pression de l’autre. Dans de nombreux cas, la pression dans la zone de basse pression est suffisamment basse pour provoquer la cavitation, un changement de phase du liquide à la vapeur, comme l’ébullition, mais causé par un changement de pression plutôt que par un changement de température. Lorsque des zones de basse pression sont créées dans l’eau, des bulles de vapeur se forment, et quand ces bulles quittent la zone de basse pression, elles s’effondrent (implosent).
Comme les différences de pression sont généralement importantes, l’effondrement des bulles de cavitation est très puissant et bruyant. D’autres facteurs liés au navire, comme la conception de la coque, influencent également la cavitation. Des mesures ont montré que la cavitation des hélices est plus fréquente à des vitesses plus élevées en raison des charges plus importantes exercées sur les pales de l’hélice. La cavitation peut également se produire quand les pales de l’hélice sont mal alignées ou endommagées. En plus de produire beaucoup de bruit, les bulles de cavitation peuvent endommager ou dégrader les surfaces métalliques comme les hélices, réduisant ainsi leur performance et leur efficacité.
Bruit rayonné sous-marin : Bruit généré sous l’eau par l’activité humaine dans l’environnement océanique. Diverses industries contribuent à ce bruit : la production énergétique extracôtière, les travaux de construction, les opérations militaires et, bien sûr, le trafic maritime. Le bruit produit par les navires peut également être appelé bruit sous-marin des navires.
Vie marine : Mammifères, poissons et invertébrés vivant dans l’environnement océanique.
Cavitation : Changement de phase de l’état liquide à l’état de vapeur, comme l’ébullition, mais causé par un changement de pression plutôt que par un changement de température. Lorsque des zones de pression suffisamment basse sont générées dans l’eau, des bulles de vapeur (cavités) se forment. Quand les bulles de vapeur quittent la zone de basse pression, elles s’effondrent (implosent).
Comme les différences de pression sont généralement importantes, l’effondrement des bulles de cavitation est très puissant et bruyant. D’autres facteurs liés au navire, comme la conception de la coque, influencent également la cavitation. Des mesures ont montré que la cavitation des hélices est plus fréquente à des vitesses plus élevées en raison des charges plus importantes exercées sur les pales de l’hélice. La cavitation peut également se produire quand les pales de l’hélice sont mal alignées ou endommagées. En plus de produire beaucoup de bruit, les bulles de cavitation peuvent endommager ou dégrader les surfaces métalliques comme les hélices, réduisant ainsi leur performance et leur efficacité.
Transport maritime commercial : Navires qui transportent des marchandises ou des personnes à des fins d’échanges économiques, y compris (mais sans s’y limiter) les porte-conteneurs, les vraquiers, les transporteurs de véhicules, les pétroliers (navires-citernes), les navires de croisière et les traversiers.
Fréquence : Le son se déplace dans un milieu comme l’eau sous forme d’onde, d’où le terme « onde sonore ». La fréquence, aussi appelée « hauteur », indique la fréquence à laquelle une onde sonore se répète en une seule seconde. Mesurée en hertz (Hz), ou cycles par seconde; les nombres plus élevés signifient des sons plus aigus et les nombres plus bas, des sons plus graves.


